Autonomous technology is spreading across numerous applications at an unprecedented pace. Amongst others, the DARPA Grand Challenge for autonomous ground vehicles has given an indication of what is possible to achieve using state-of-the-art sensors in combination with cleverly designed autonomous algorithms. We believe the increasing use of autonomy in vehicle systems eventually will propagate to the maritime industry and that we will see an increasing level of autonomy on ships in order to increase safety, and to reduce operational costs, emissions and impacts from human-induced errors.
When operating autonomously at sea, a collision avoidance (COLAV) system must be able to tackle the dangers imposed by other vessels operating in the same area. To avoid moving obstacles, one must have an idea about the future positions of these obstacles. A common approach is to assume that other vessels will keep their course and speed, and calculate a straight-line trajectory based on this assumption. This approach may, however, prove insufficient in some scenarios. By considering previous positions, electronic nautical charts, historical and/or real-time AIS (automatic identification system) data, traffic lanes etc., better estimates can often be obtained. This project will look into alternative solutions based on such data.
This proposal is intended as a combined project and master thesis. It builds on work by two previous 5th year students. Simen Hexeberg first made a method which would return a candidate trajectory for any vessel. In the master thesis he extended this to a method which returns an ensemble of candidate trajectories. Bjørnar Dalsnes continued this work by revising the data structures and including statistical sampling. He is currently integrating the revised NCDM with MPC-based COLAV.
 |
 |
|
|---|---|---|
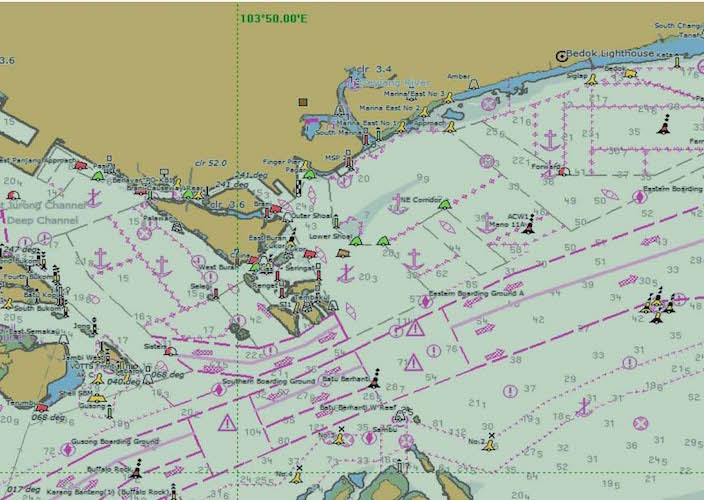
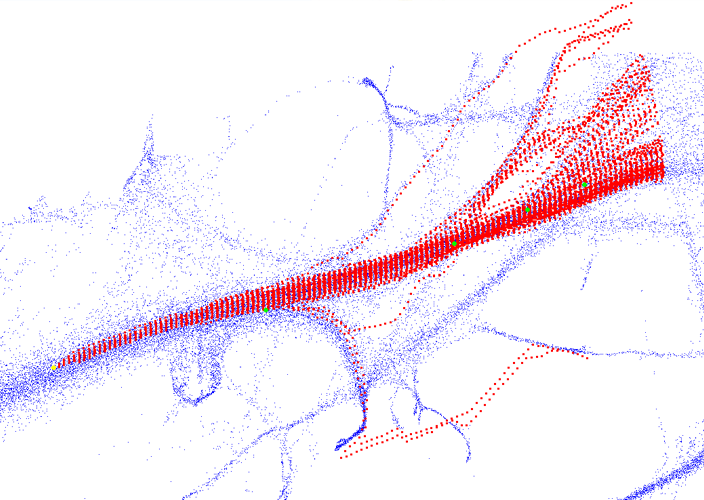
| Electronic charts contains large amount of static information, which can be usable for predicting future vessel positions. | Example of Hexeberg’s Nearest Course Distribution Method (NCDM) which predicts vessel movement purely based on AIS data. |
Proposed Tasks
For the project assignment, the following tasks are proposed:
- Write a survey of possible techniques for long and short-term obstacle trajectory prediction. The candidate should also get an overview of the international regulations for avoiding collision at sea (COLREGS) and some suitable COLAV algorithms.
- Design a variety of simulations using Dalsnes’ NCDM in COLAV. Compare the approach with assuming constant course and speed.
- Quantify strengths and weaknesses. In which scenarios can the NCDM aid COLAV?
- Look into other sources of data such as electronic nautical charts.
For the master thesis, a variety of tasks may be explored depending on the interest of the student:
- Testing of the method in real-world experiments.
- Testing with other COLAV methods.
- Compare the NCDM with Gaussian Process learning, or other machine learning techniques.
Prerequisites
This is a “thinking outside of the box” kind of project which does not require and specific prerequisites, beyond strong creativity and programming skills. However, knowledge about MPC and Probabilistic Machine Learning will be very useful.
Autosea
The candidate will be associated with the AUTOSEA project, which is a collaborative research project between NTNU, DNV GL, Kongsberg Maritime and Maritime Robotics, focused on achieving world-leading competence and knowledge in the design and verification of methods and systems for sensor fusion and COLAV for ASVs. The project has access to supervision and physical test platforms through our industry partners.
Supervisors
Main supervisor: Edmund F. Brekke.
Co-supervisor: Bjørn-Olav H. Eriksen
References
- Hexeberg (2017): “AIS-based Vessel Trajectory Prediction for ASV Collision Avoidance”, Master thesis, NTNU.
- Hexeberg et al. (2017): “AIS-based Vessel Trajectory Prediction”, Proc. Fusion 2017, Xi’An, China.
- Eriksen et al. (2017): “MPC-Based mid-level collision avoidance for ASVs using nonlinear programming”, Proc. CCTA 2017, Hawaii, USA.
- Bishop (2006): “Pattern Recognition and Machine Learning”, Springer.