Background
Target tracking is an important capability of autonomous vehicles moving in environments with traffic, as the autonomous vehicle needs to keep track of all other moving objects in its vicinity, and predict their future movement. Target tracking entails processing of data from various exteroceptive sensors, such as radar, lidar or camera.
The design of tracking methods will inevitably involve various compromises. One such compromise is between accuracy and robustness. For a target that moves straight ahead, as ships often do, the highest accuracy will be achieved using a model that assumes straight motion with very little plant noise. However, such a model will easily discard more drastic maneuvers when and if they happen, so its robustness is likely to be inferior to a model with higher plant noise.
The goal of this project is to explore solutions to this paradox. As a benchmark we have the conventional constant velocity (CV) model, which models acceleration as white plant noise. Alternative methods include interacting multiple models (IMM), models that include heading and turn-rate in the state vector, models that use colored plant noise, etc. Other possibilities may be to use a CV model in the target tracker itself, but conduct online post-processing to improve the accuracy.
 |
 |
|
|---|---|---|
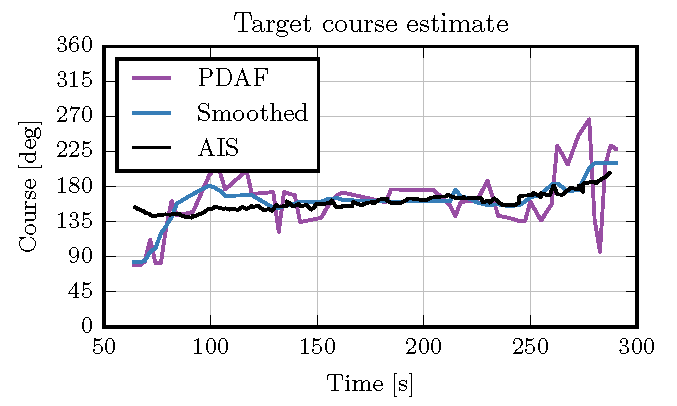
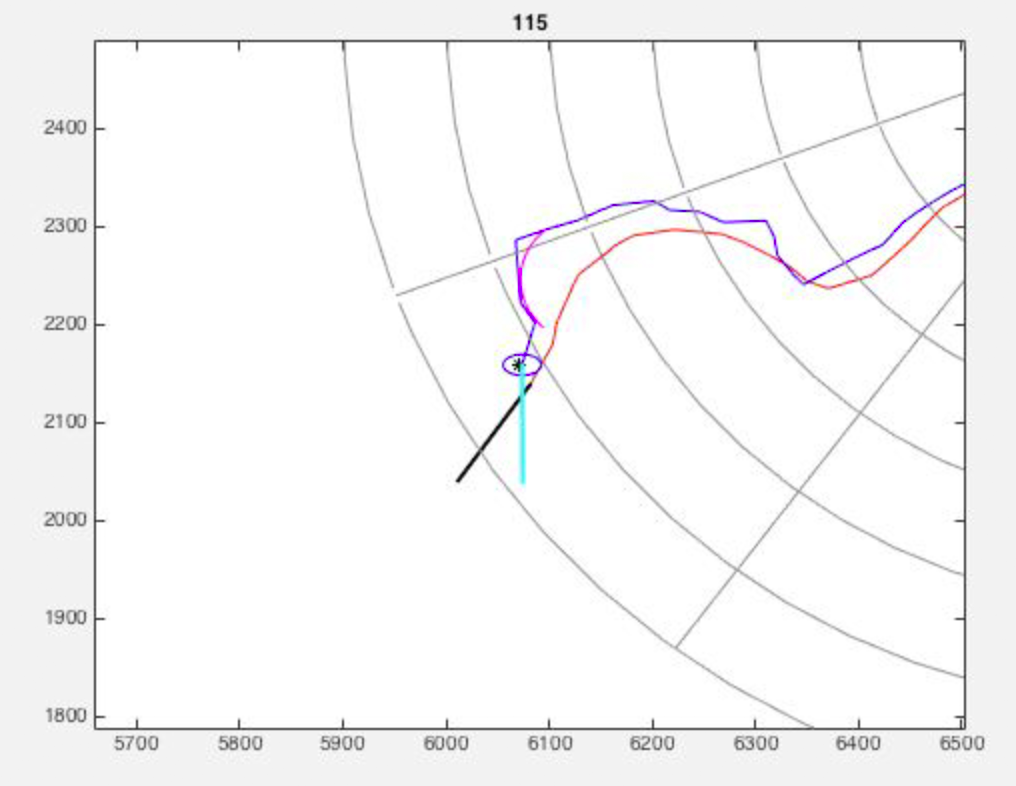
| Course estimates may typically fluctuate by 45 degrees. Can you do better? | Another example of how estimated course (cyan) differs significantly from true course (black). Is it possible to do better, or is it perhaps not? |
Proposed Tasks for the 5th year project
- Make a collection of test data, both with basis in real radar data from Autosea experiments and with basis in simulations.
- Implement a basic CV-model Kalman filter on the test data, and investigate various performance metrics as functions of the assumed plant noise.
- Conduct similar investigations for several other filters, for instance those suggested above.
- If time permits, explore the potential of online post-processing and variable structure IMM methods in order to enhance accuracy.
- Write report.
Proposed Tasks for the master thesis
The project work aims to be extended into a master thesis for the spring of 2019. Tasks for the master thesis include:
- With basis in the specialization project, choose a promising alternative to the standard CV Kalman-filter.
- Combine the chosen method with a data association method in order to deal with false alarms and clutter.
- Run tests on real and simulated data in order to investigate robustness.
Contact
For more information, contact main supervisor Edmund F. Brekke
References
- Best, R. A. & Norton, J. P. (1997): “A New Model And Efficient Tracker For A Target With Curvilinear Motion”, IEEE Transactions on Aerospace and Electronic Systems.
- Shuster et al. (2014): “Collision Avoidance for Vessels using a Low-Cost Radar Sensor”, Proceedings of IFAC World Congress, Cape Town, South Africa.
- Kirubarajan & Bar-Shalom (2003): “Kalman Filter Versus IMM Estimator: When Do We Need the Latter?”, IEEE Transactions on Aerospace and Electronic Systems.