 |
Background
Safe navigation for an unmanned vessel require robust positioning. Traditional GPS positioning is commonly used for navigation of manned vessel, but is not considered robust enough as the only positioning source of an unmanned ship. The GPS system may for instance suffer from spoofing.
Scope
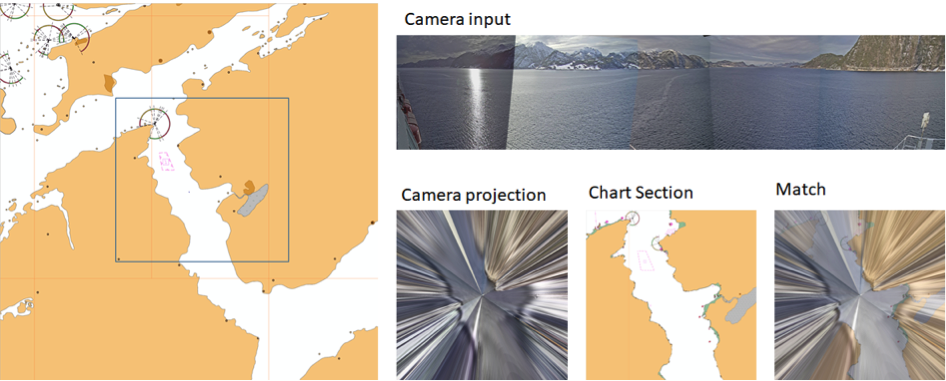
The goal of this project is to explore methods of positioning by use of camera and chart data. The ships area of operation is considered know, providing a limited chart area. The illustration below shows projected camera data on top of a chart selection.
Proposed tasks
- Conduct a literature study on existing methods of camera positioning.
- Identify algorithm candidates for solving the camera and map correlation.
- Write report
Prerequisites
Required background knowledge: Experience in Python. Interest in machine learning.
Useful, but not required, background knowledge: Courses in statistics, algorithms development and/or artificial intelligence. Experience with machine learning and deep learning.
Contact
Main supervisor: Edmund Brekke.
Co-supervisors: Arild Nøkland, Ståle Smedseng, Torbjørn Barheim (Kongsberg Seatex)